Dominik Bauer

I am a Machine Learning Engineer at Latitude AI.
Before that, I was a Postdoctoral Research Fellow at the Robotics and Embodied Artificial Intelligence Lab (REAL) at Stanford University and Columbia University, and the Vision for Robotics Lab (V4R) at TU Wien.
selected publications


all publications
2025



2024


2023

2022


2021
-
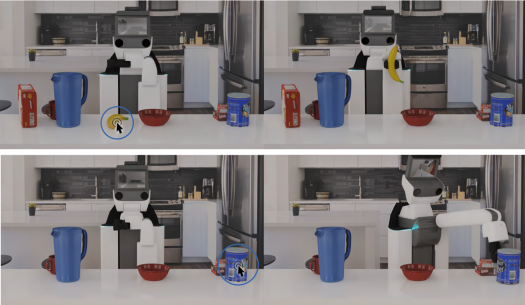 A Study Design for Evaluation of Trust and Understandability through Interactive Multi-Modal Explanations of Robotic FailureHRI 2021 WYSD Workshop, 2021
A Study Design for Evaluation of Trust and Understandability through Interactive Multi-Modal Explanations of Robotic FailureHRI 2021 WYSD Workshop, 2021

2020
-
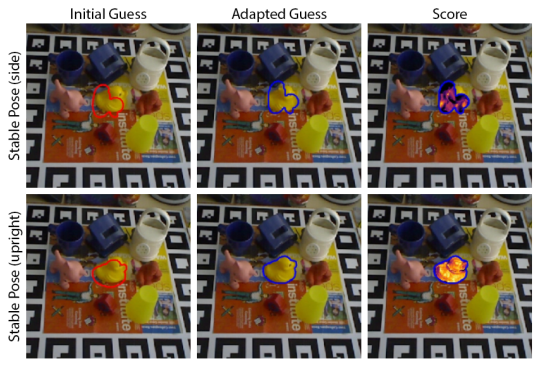 Scene Explanation through Verification of Stable Object PosesICRA 2020 Workshop on Perception, Action, Learning: From Metric-Semantic Scene Understanding to High-level Task Execution, 2020
Scene Explanation through Verification of Stable Object PosesICRA 2020 Workshop on Perception, Action, Learning: From Metric-Semantic Scene Understanding to High-level Task Execution, 2020







